ケーススタディCASESTUDY
ケーススタディ
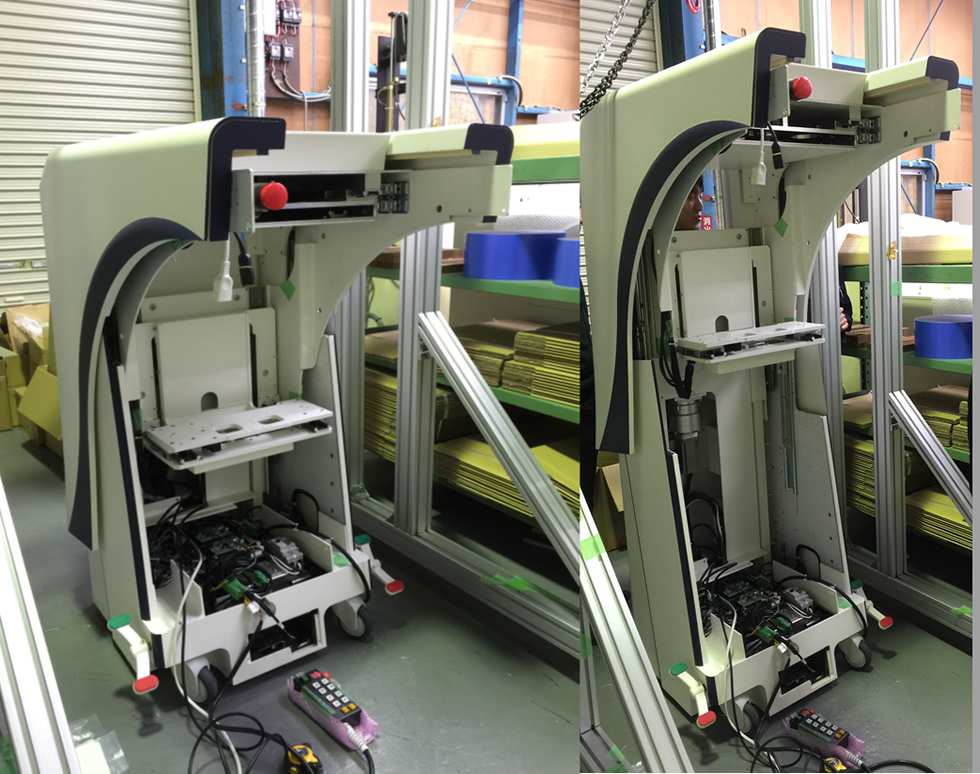
医療ロボット制御ユニット (デモ用)
| 製作内容 | 回路設計、ソフト設計、基板設計、実装、配線、調整、検査 |
|---|---|
| 製作範囲 | 試作 |
| 仕様内容 | 4軸のサーボモーターを制御し、医療ロボットの形態を自動にて変形させる。 |
| 製作コメント | サーボモーターのドライバが4軸それぞれに必要な為、多数のポートが必要となり、マイコン2個を使用。 それぞれ、親機、子機と連携させ4軸のサーボモーターの同時駆動を実現。 |
| 製作内容 | 回路設計、ソフト設計、基板設計、実装、配線、調整、検査 |
|---|---|
| 製作範囲 | 試作 |
| 仕様内容 | 4軸のサーボモーターを制御し、医療ロボットの形態を自動にて変形させる。 |
| 製作コメント | サーボモーターのドライバが4軸それぞれに必要な為、多数のポートが必要となり、マイコン2個を使用。 それぞれ、親機、子機と連携させ4軸のサーボモーターの同時駆動を実現。 |